I rarely update this page. Please refer to my Google Scholar and CV.
Selected Publications
2026
2025
2024
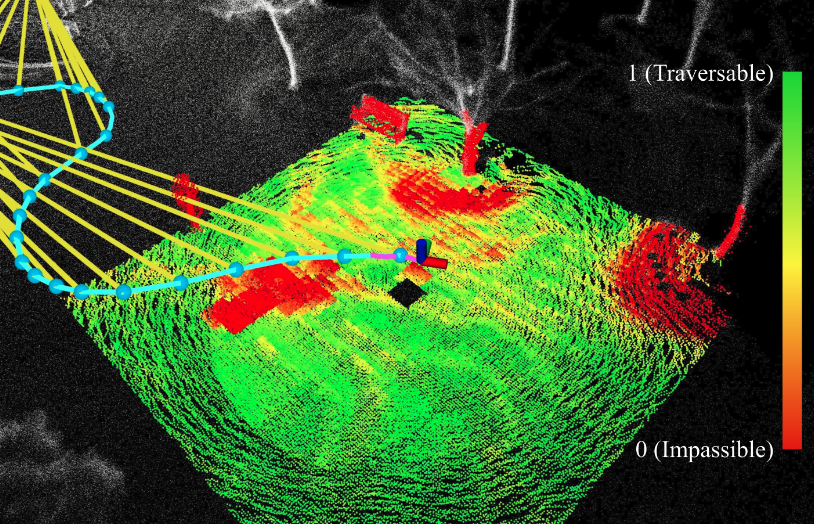
Similar but Different: A Survey of Ground Segmentation and Traversability Estimation for Terrestrial Robots
Int. J. Control, Automat. Syst. (IJCAS)
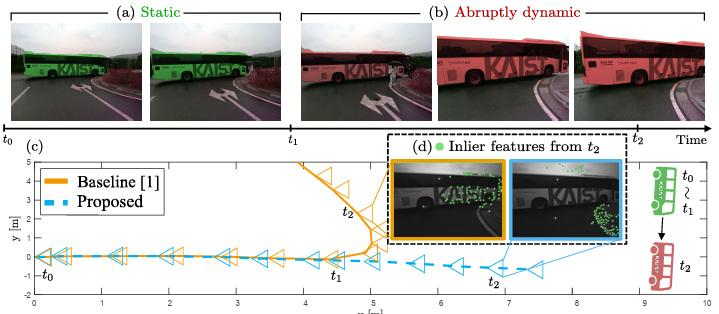
DynaVINS++: Robust Visual-Inertial State Estimator in Dynamic Environments by Adaptive Truncated Least Squares and Stable State Recovery
IEEE Robot. Automat. Lett. (RA-L)
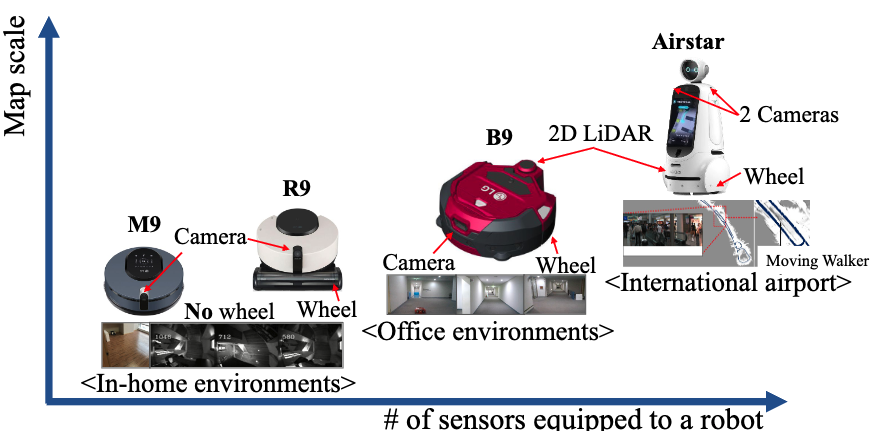
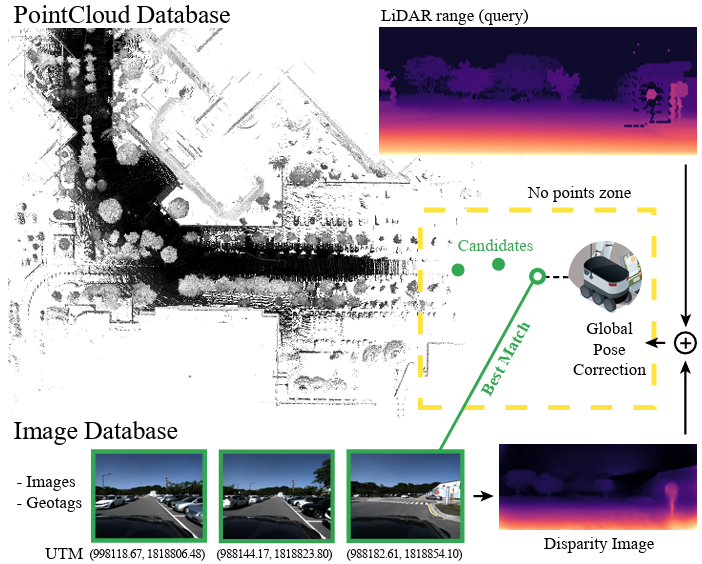
CLOi-Mapper: Consistent, Lightweight, Robust, and Incremental Mapper With Embedded Systems for Commercial Robot Services
IEEE Robot. Automat. Lett. (RA-L)
HeLiMOS: A Dataset for Moving Object Segmentation in 3D Point Clouds From Heterogeneous LiDAR Sensors
IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS)
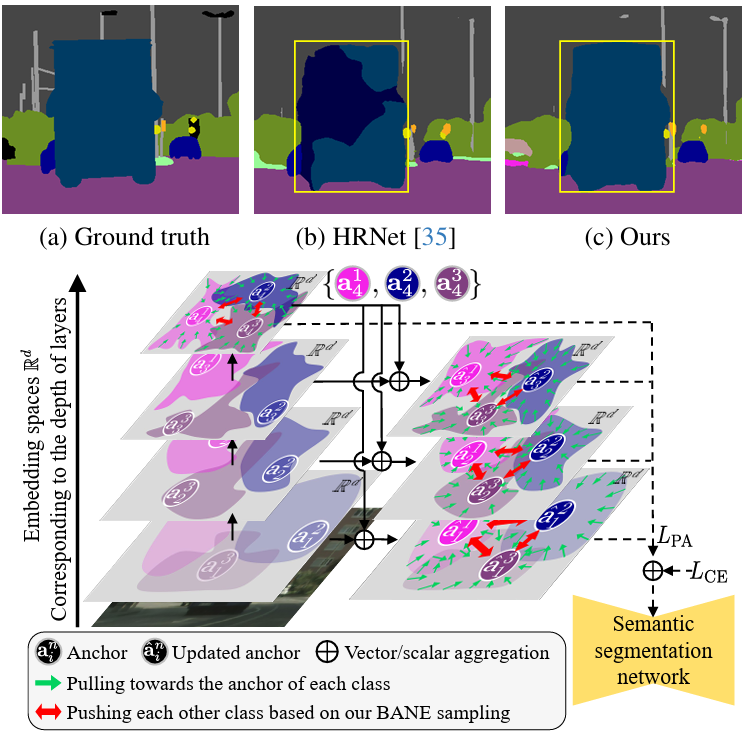
Contextrast: Contextual Contrastive Learning for Semantic Segmentation
IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR)
2023
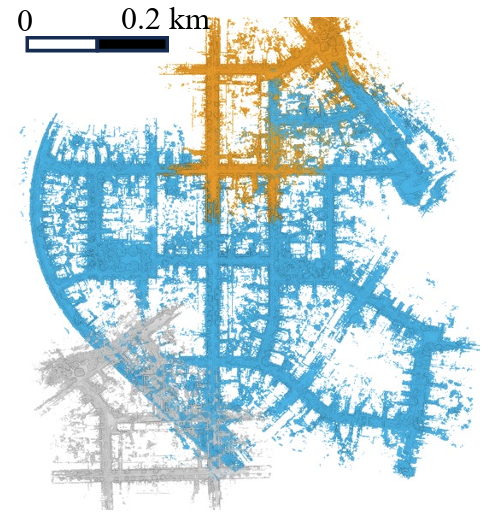
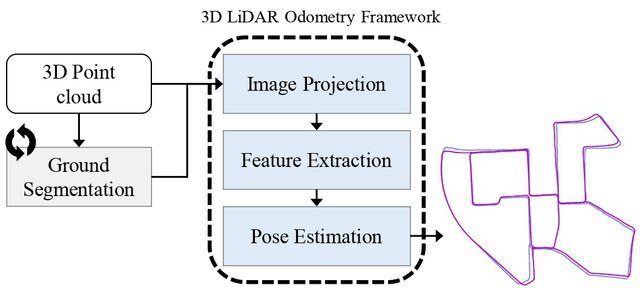
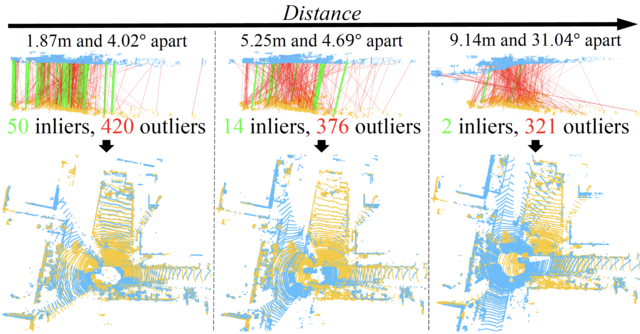
Quatro++: Robust Global Registration Exploiting Ground Segmentation for Loop Closing in LiDAR SLAM
Int. J. Robot. Res. (IJRR)

TOSS: Real-time Tracking and Moving Object Segmentation for Static Scene Mapping
Proc. Int. Conf. Robot Intell. Tech. Applications (RiTA) (Best Paper Award)
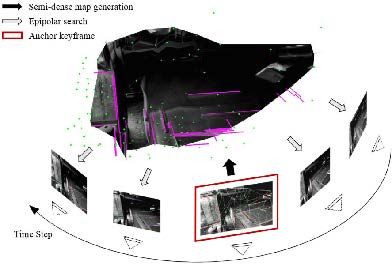
Enhancing Robustness of Line Tracking Through Semi-Dense Epipolar Search in Line-based SLAM
IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS)
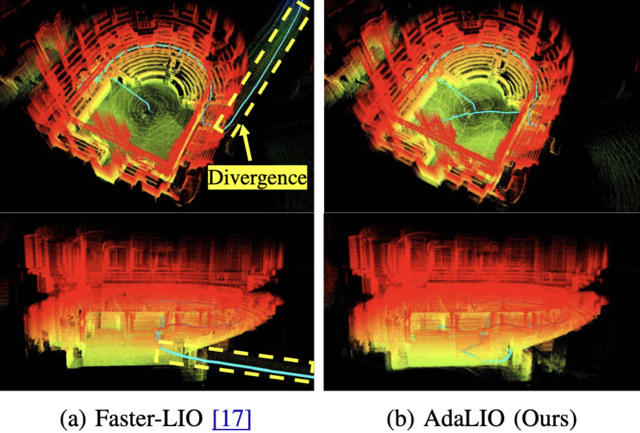
AdaLIO: Robust Adaptive LiDAR-Inertial Odometry in Degenerate Indoor Environments
Proc. Int. Conf. Ubiquit. Robot. (UR)
2022

2021
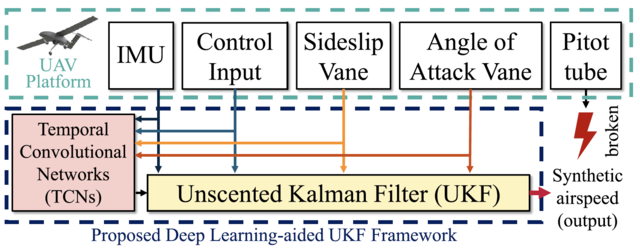
Deep Learning-Aided Synthetic Airspeed Estimation of UAVs for Analytical Redundancy with a Temporal Convolutional Network
IEEE Robot. Automat. Lett. (RA-L)

State Estimation of HALE UAV With Deep Learning-Aided Virtual AOA/SSA Sensor for Analytical Redundancy
IEEE Robot. Automat. Lett. (RA-L)
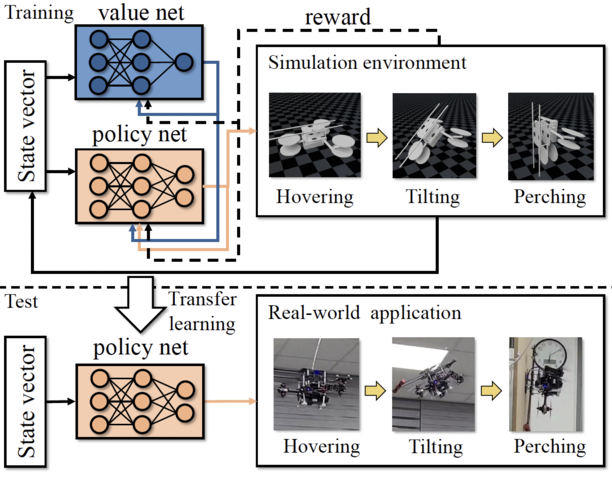
Low-level Pose Control of Tilting Multirotor for Wall Perching Tasks Using Reinforcement Learning
IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS)
2020
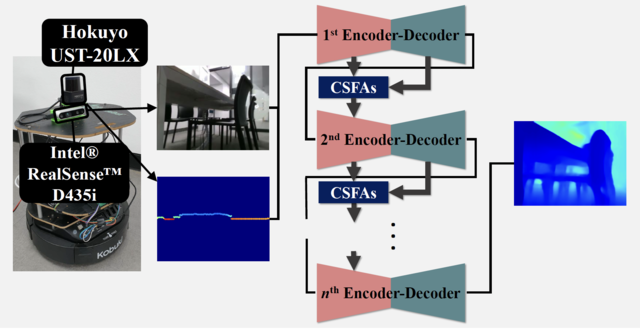
MSDPN: Monocular Depth Prediction With Partial Laser Observation Using Multi-stage Neural Networks
IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS)
2019

RONet: Real-Time Range-Only Indoor Localization via Stacked Bidirectional LSTM with Residual Attention
IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS)