# Introduction
Ceres Solver는 Google에서 개발한 Non-linear Optimization Library입니다.
처음 Graph SLAM을 시작하는 분들이라면 한번 쯤 [Cartographer](https://opensource.googleblog.com/2016/10/introducing-cartographer.html)를 들어봤으셨을텐데, Cartographer 내부를 보시면 Ceres Solver로 optimization을 하고 있는 것을 볼 수 있습니다. 이처럼 Non-linear cost function을 Ceres Solver를 이용하면 간단히 최적화할 수 있기 때문에, Ceres Solver는 저희가 **어떻게 optimization을 하는가**에 대한 노력을 쏟는 것을 줄이게 만들고 **무엇을 optimization할지**에 더 집중할 수 있게 해줍니다.
# 튜토리얼 자료 설치
튜토리얼 자료는 [여기](https://github.com/LimHyungTae/helloceres)에 github로 올려두었습니다. Step-by-step으로 설명드릴 예정입니다.
1. 먼저 기존의 Ceres 공식 홈페이지에서 Ceres Solver를 설치한다.
[http://ceres-solver.org/installation.html](http://ceres-solver.org/installation.html)
2. 위의 git 레포지토리를 clone한다.
$ git clone https://github.com/LimHyungTae/helloceres.git
3.
그리고 helloceres 폴더로 이동한 후 cmake와 make를 해준다.
$ cd helloceres
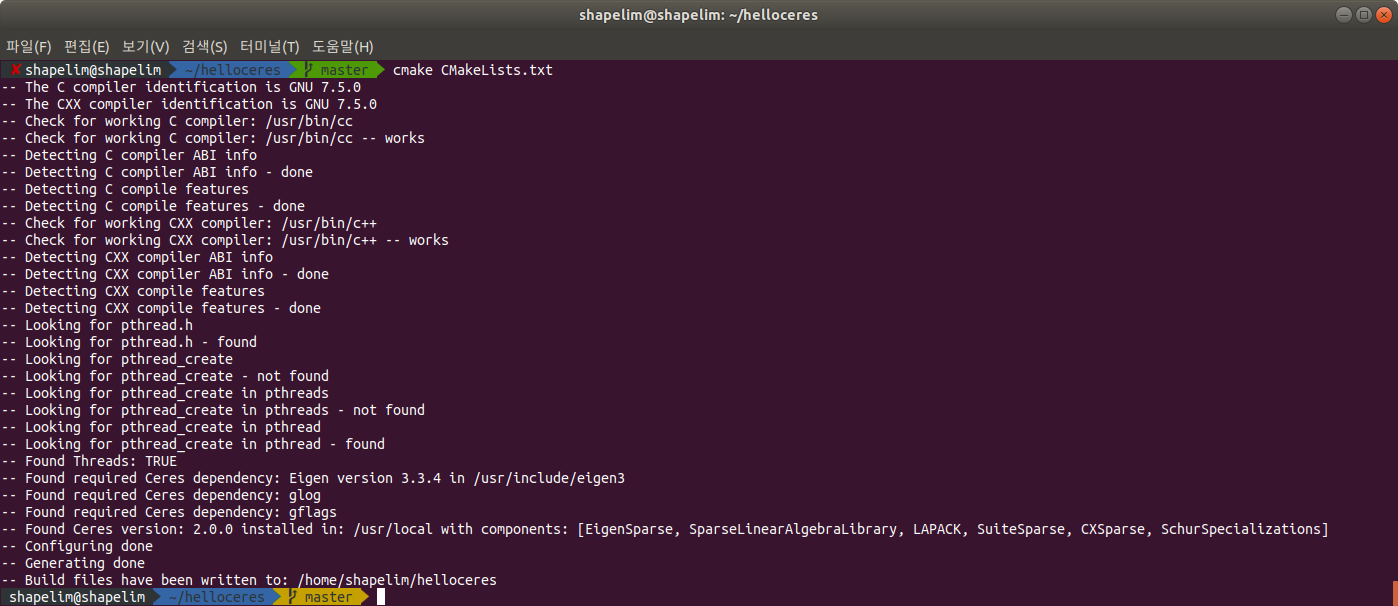
$ cmake CMakeLists.txt
**==> 결과**
$ make
**==> 결과**
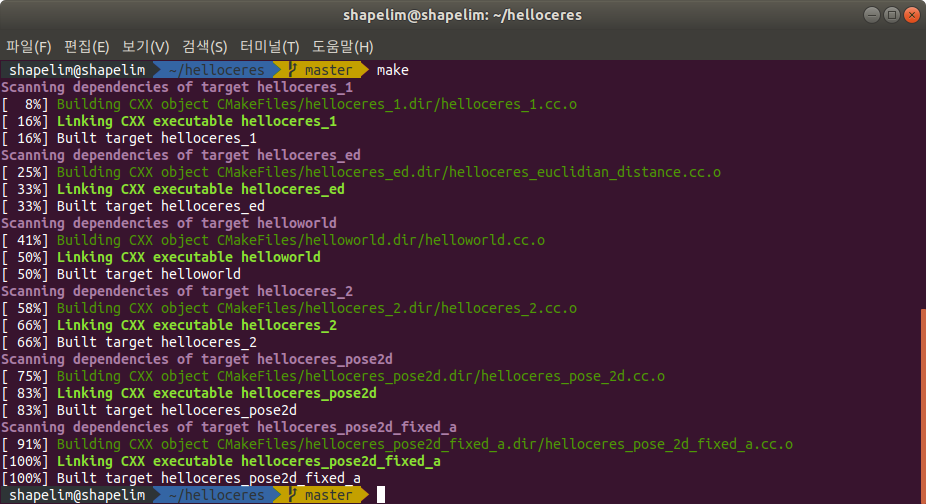
그러면 폴더 상에 컴파일된 파일이 생성되는 것을 볼 수 있다.
### 실행
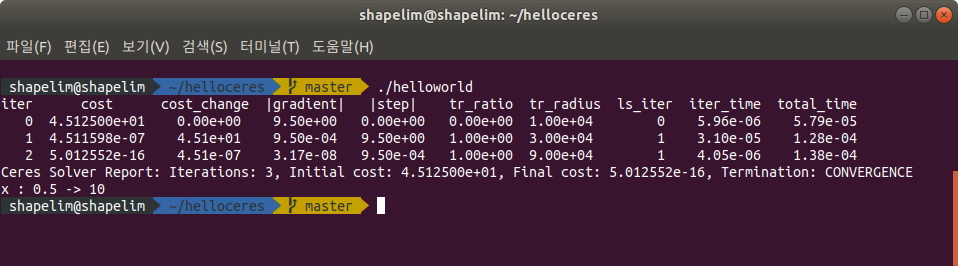
실행은 아래와 같이 하면 결과가 출력된다.
$ ./${filename}
# 1. Hello World
# 2 여러 Cost function 사용하기
