🚀 Interactive Demo (26.May.07): 본 포스트의 PCL 코드들을 브라우저에서 바로 실행해볼 수 있는 interactive demo 사이트를 추가했습니다.
Search in Pointcloud
pointcloud 상에서 기준 point(query point)를 기준으로 search 하는 법은 크게
- Radius search
- k-nearest Neighbor search
가 있습니다. 먼저, Radius search는 pointcloud 상 주어진 query point의 거리 r 안에 있는 모든 point들의 index를 리턴해주는 함수입니다. 활용처는 크게 두가지가 있는데,
- 여기처럼 모바일 플랫폼의 sensor frame 주변의 noise의 index를 추출해서 제거할 때 (하지만, 엄밀히 따지면 연산적으로 비효율적임)
- 전체 map 상에서 global한 좌표를 기점으로 인근의 submap을 추출할 때 (예시는 여기)
등입니다.
How to use
아래는 두 query points query1과 query2에 대해 8m 이내로 인접해 있는 pointcloud를 추출하는 예제입니다.(52번 째 줄 부터)
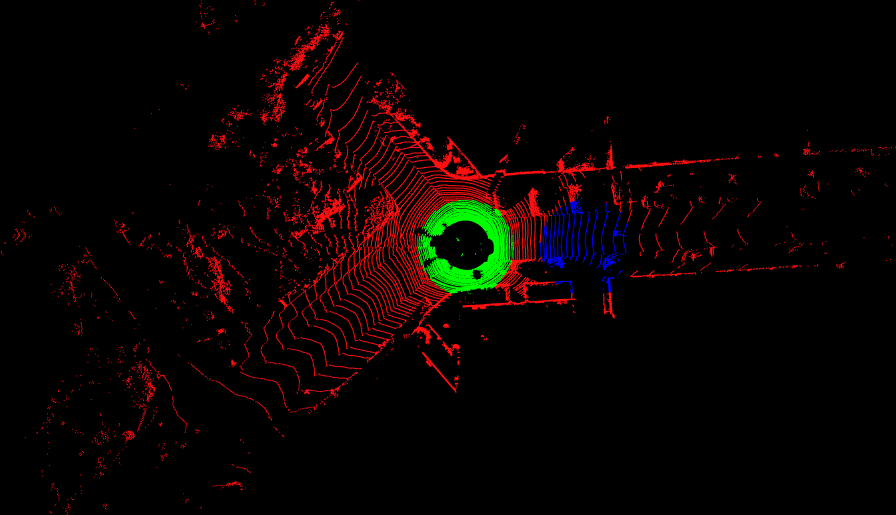
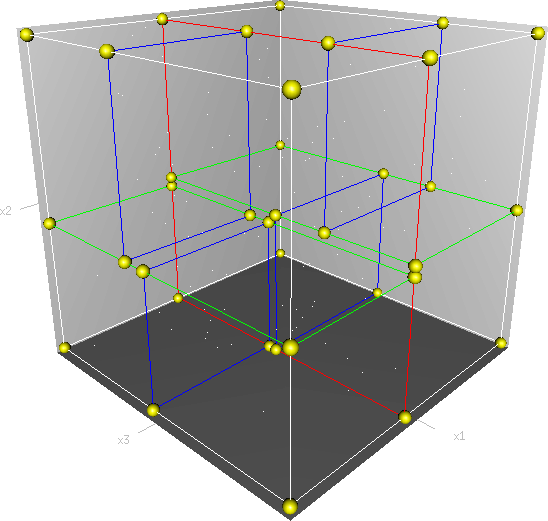
위의 그림처럼, input cloud(빨강)가 주어졌을 때
query1의 위치인 (0, 0, 0) 이내의 8m 영역(초록색)query2의 위치인 (20, 0, 0) 이내의 8m 영역(파란색)
을 추출해낼 수 있습니다.
주의하실 점은 KdTree는 setInputCloud()할 때 내부적으로 input pointcloud를 트리화하여 저장하기 때문에, time cost가 다소 존재한다는 것입니다. 하지만 한 번 등록해두면 radiusSearch()를 통해 찾을 때는 단순히 for문을 돌리는 것보다는 훨씬 빠릅니다.
따라서 자신이 적용할 task가 KdTree를 사용하기 전에 inputcloud를 한 번 등록해두고 계속 search를 해야 할 task인가를 검토하는 것이 중요합니다.
Point Cloud Library Tutorial 시리즈입니다.
모든 코드는 이 레포지토리에 있고, ros package로 구성되어 있어 build하여 직접 돌려보실 수 있습니다
- ROS Point Cloud Library (PCL) - 0. Tutorial 및 기본 사용법
- ROS Point Cloud Library (PCL) - 1. Ptr, ConstPtr의 완벽 이해 (1) shared_ptr
- ROS Point Cloud Library (PCL) - 1. Ptr, ConstPtr의 완벽 이해 (2) Ptr in PCL
- ROS Point Cloud Library (PCL) - 1. Ptr, ConstPtr의 완벽 이해 (3) Ptr in 클래스 멤버변수
- ROS Point Cloud Library (PCL) - 2. 형변환 - toROSMsg, fromROSMsg
- ROS Point Cloud Library (PCL) - 3. Transformation
- ROS Point Cloud Library (PCL) - 4. Viewer로 visualization하는 법
- ROS Point Cloud Library (PCL) - 5. Voxelization
- ROS Point Cloud Library (PCL) - 6. PassThrough
- ROS Point Cloud Library (PCL) - 7. Statistical Outlier Removal
- ROS Point Cloud Library (PCL) - 8. KdTree를 활용한 Radius Search
- ROS Point Cloud Library (PCL) - 9. KdTree를 활용한 K-nearest Neighbor Search (KNN)
- ROS Point Cloud Library (PCL) - 10. Normal Estimation
- ROS Point Cloud Library (PCL) - 11. Iterative Closest Point (ICP)
- ROS Point Cloud Library (PCL) - 12. Generalized Iterative Closest Point (G-ICP)
- ROS Point Cloud Library (PCL) - 13. getVector3fMap()을 통한 효율적인 복사