Pose2의 Jacobian 구하기
자, 그럼 Jacobian에 대해 많이 친숙해진 것 같으니 대망의, Pose2 상에서 아래 코드의 H1과 H2를 구해보자.
/// evaluate error, returns vector of errors size of tangent space
Vector evaluateError(const T& p1, const T& p2,
OptionalMatrixType H1, OptionalMatrixType H2) const override {
T hx = traits<T>::Between(p1, p2, H1, H2); // h(x)
// manifold equivalent of h(x)-z -> log(z,h(x))
#ifdef GTSAM_SLOW_BUT_CORRECT_BETWEENFACTOR
typename traits<T>::ChartJacobian::Jacobian Hlocal;
Vector rval = traits<T>::Local(measured_, hx, OptionalNone, (H1 || H2) ? &Hlocal : 0);
if (H1) *H1 = Hlocal * (*H1);
if (H2) *H2 = Hlocal * (*H2);
return rval;
#else
return traits<T>::Local(measured_, hx);
#endif
}
Unary factor에서 유도했던 것을 좀 더 일반화하여, 세 단계로 나눠서 수식을 유도해 보자.
Step 1. Update Function 정의
2D 상의 Lie Group인 SE(2)와 대응되는 vector \(\boldsymbol{\xi} \in \mathbb{R}^3\)를 \(\boldsymbol{\delta} = [\delta\mathbf{t}; \delta\theta]^\intercal\)를 통해 update하는 식을 먼저 유도해보자. \(\left[\begin{array}{cc} \mathbf{R} & \mathbf{t} \\ \mathbf{0}_{1\times2} & 1 \end{array}\right]\left[\begin{array}{cc} \mathrm{Rot}(\delta\theta) & {\delta\mathbf{t}} \\ \mathbf{0}_{1\times2} & 1 \end{array}\right]\)를 통해서, translation 부분은 \(\mathbf{t} + \mathrm{Rot}(\theta) \delta\mathbf{t}\), rotation matrix는 \(\mathbf{R}\mathrm{Rot}(\delta\theta) = \mathrm{Rot}(\theta)\mathrm{Rot}(\delta\theta)\)이므로, rotation matrix는에 대응되는 각도 값은 \(\theta + \delta \theta\)가 된다. 따라서, update function \(\boldsymbol{\xi} \oplus \boldsymbol{\delta}\)는 다음과 같이 정의된다:
\[\boldsymbol{\xi} \oplus \boldsymbol{\delta} = \left[\begin{array}{c} \mathbf{t} + \mathrm{Rot}(\theta) \delta\mathbf{t} \\ \theta + \delta \theta \end{array}\right] \in \mathbb{R}^3 \; \; \; \; \text{(1)}\]2D차원에서의 rotation은 완전 러키비키하게 단순한 yaw 각의 덧셈으로 SE(2)의 회전을 표현할 수 있기 때문에, (1)과 같이 단순하게 표기할 수 있다 (3차원에서는 어림도 없다!). 앞으로는 편의 상 \(\mathbf{0}_{1\times2}\)는 그냥 \(\mathbf{0}\)라고 적겠다.
Step 2. Measurement Function \(h(\cdot)\) 정의
Lie Group 상에서 두 pose간의 뺄셈과 대응되는 개념은 위의 코드에서 inverse된 p1의 transformation matrix와 \(\left(\mathbf{T}^{w}_1\right)^{-1}\) p2의 transformation matrix \(\mathbf{T}^{w}_2\)를 곱하는 것이다. 따라서 아래 수식을 전개하면:
따라서 두 pose의 차이에 대한 함수를 vector화 해서 나타내면
\[h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2) = \left[\begin{array}{c} \mathrm{Rot}(-\theta_1)(\mathbf{t}_2 - \mathbf{t}_1) \\ \theta_2 - \theta_1 \end{array}\right]\; \; \; \; \text{(3)}\]로 표현할 수 있다 (\(\mathbf{R}^{\intercal}_1\)는 2D rotation에서 \(\mathrm{Rot}(-\theta_1)\)로 간소화해서 표현할 수 있고, \(\mathbf{R}^{\intercal}_1\mathbf{R}_2\)를 표현하는 rotation angle이 \(\theta_2 - \theta_1\)이기 때문).
Step 3. \(h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2) \oplus \boldsymbol{\delta}\)와 \(h(\boldsymbol{\xi}_1 \oplus \boldsymbol{\delta}_1, \boldsymbol{\xi}_2 \oplus \boldsymbol{\delta}_2)\) 전개하기
자, 다시 복습을 해보자:
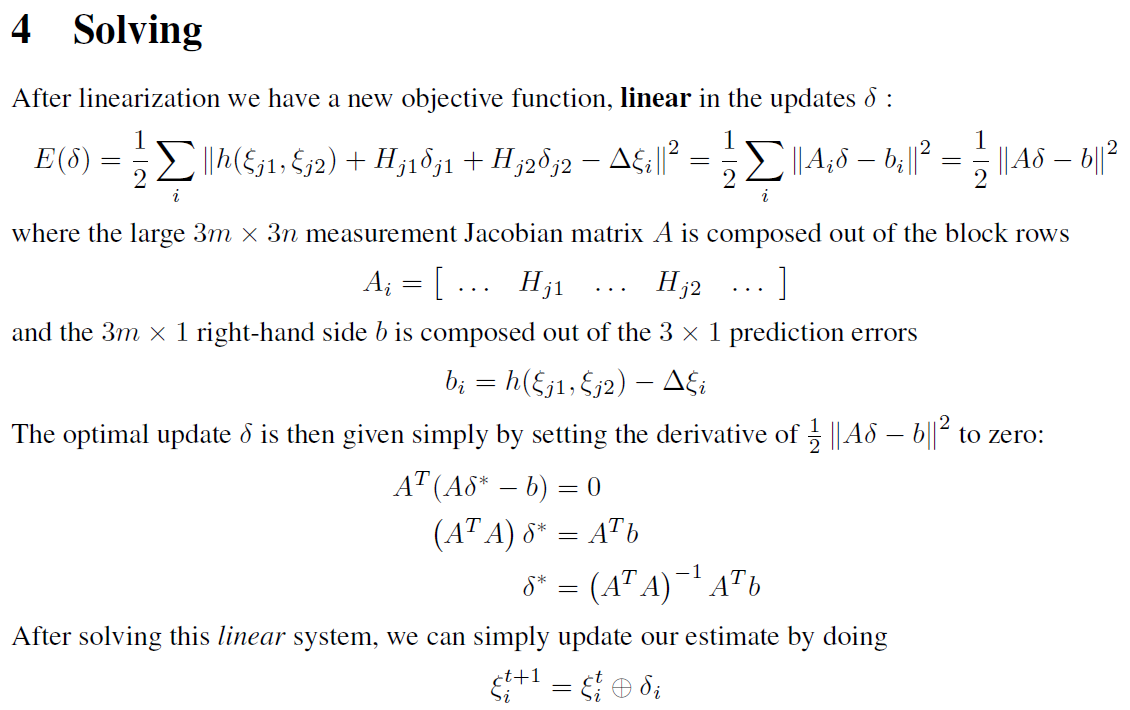
(계속 remind되는 스크린샷…하지만 이만큼 잘 설명되어 있는 글이 없다.)
우리가 이제 해야할 것은? 그림 상에 있는 \(h(\boldsymbol{\xi}_1 \oplus \boldsymbol{\delta}_1, \boldsymbol{\xi}_2 \oplus \boldsymbol{\delta}_2) = h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2) \oplus \boldsymbol{\delta}\)를 전개해서 \(\boldsymbol{\delta}\)를 \(\boldsymbol{\delta}_1\)와 \(\boldsymbol{\delta}_2\)의 선형 조합으로 표현할 수 있는 \(\mathbf{H}_1\)과 \(\mathbf{H}_2\)를 전개해서 구하면 된다.
Step 3-1. \(h(\boldsymbol{\xi}_1 \oplus \boldsymbol{\delta}_1, \boldsymbol{\xi}_2 \oplus \boldsymbol{\delta}_2)\) 전개하기
\(h(\boldsymbol{\xi}_1 \oplus \boldsymbol{\delta}_1, \boldsymbol{\xi}_2 + \boldsymbol{\delta}_2)\)는 수식 (1)을 통해 업데이트된 값들을 (3)의 값을 대입하기만 하면 된다. 즉, \(\mathbf{t}_1 \leftarrow \mathbf{t}_1 + \mathbf{R}_1 \delta\mathbf{t}_1\), \(\theta_1 \leftarrow \theta_1 + \delta \theta_1\), \(\mathbf{t}_2 \leftarrow \mathbf{t}_2 + \mathbf{R}_2 \delta\mathbf{t}_2\), \(\theta_2 \leftarrow \theta_2 + \delta \theta_2\)를 (3)에 대입하면 아래와 같이 되고:
\[h(\boldsymbol{\xi}_1 \oplus \boldsymbol{\delta}_1, \boldsymbol{\xi}_2 \oplus \boldsymbol{\delta}_2) = \left[\begin{array}{c} \mathrm{Rot}\left(-\theta_1-\delta \theta_1\right)\left(\mathbf{t}_2+\mathbf{R}_2 \delta \mathbf{t}_2-\mathbf{t}_1-\mathbf{R}_1 \delta \mathbf{t}_1\right) \\ \theta_2+\delta \theta_2-\theta_1-\delta \theta_1 \end{array}\right]\; \; \; \; \text{(4)}\]미소 각도에 대한 rotation는 \(\mathrm{Rot}\left(\delta_\theta\right) \simeq\left[\begin{array}{cc} 1 & -\delta_\theta \\ \delta_\theta & 1 \end{array}\right]=\mathbf{I}_{2 \times 2}+\hat{\Omega} \delta_\theta\)라 표현 할 수 있다는 것을 이미 배웠으므로, 이를 풀어서 쓰면 아래와 같아진다:
\[h(\boldsymbol{\xi}_1 \oplus \boldsymbol{\delta}_1, \boldsymbol{\xi}_2 \oplus \boldsymbol{\delta}_2) = \left[\begin{array}{c} \left(\mathbf{R}_1^\intercal - \mathbf{R}_1^\intercal \hat{\Omega} \delta \theta_1 \right)\left(\mathbf{t}_2+\mathbf{R}_2 \delta \mathbf{t}_2-\mathbf{t}_1-\mathbf{R}_1 \delta \mathbf{t}_1\right) \\ \theta_2+\delta \theta_2-\theta_1-\delta \theta_1 \end{array}\right]\; \; \; \; \text{(5)}\]이해를 돕기 위해 부연설명하자면, \(\mathrm{Rot}\left(-\theta_1-\delta \theta_1 \right) = \mathrm{Rot}\left(-\theta_1\right) \mathrm{Rot}\left(-\delta \theta_1 \right) = \mathbf{R}_1^\intercal \left( \mathbf{I}_{2 \times 2} - \hat{\Omega} \delta \theta_1 \right) = \mathbf{R}_1^\intercal - \mathbf{R}_1^\intercal \hat{\Omega} \delta \theta_1\).
Step 3-2. \(h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2) \oplus \boldsymbol{\delta}\) 전개하기
\(h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2) \oplus \boldsymbol{\delta}\) 또한 수식 (2)에 \(\boldsymbol{\delta}\)에 해당되는 transformation matrix를 곱해준 후:
\[\left[\begin{array}{cc} \mathbf{R}^{\intercal}_1\mathbf{R}_2 & \mathbf{R}^{\intercal}_1(\mathbf{t}_2 - \mathbf{t}_1) \\ \mathbf{0} & 1 \end{array}\right] \left[\begin{array}{cc} \mathrm{Rot}(\delta \theta) & \delta \mathbf{t} \\ \mathbf{0} & 1 \end{array}\right]\]다시 vector 꼴로 되돌리면 된다:
\[h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2) \oplus \boldsymbol{\delta} = \left[\begin{array}{c} \mathbf{R}_1^\intercal \mathbf{R}_2 \delta \mathbf{t} + \mathbf{R}_1^T\left(\mathbf{t}_2-\mathbf{t}_1\right) \\ \theta_2-\theta_1+\delta \theta \end{array}\right].\; \; \; \; \text{(6)}\]Step 4. 수식 전개해서 H1, H2에 대응되는 값 유도
따라서 최종적으로, 수식 (5)와 수식 (6)을 같다고 놓고 풀면 우리가 원하는 H1과 H2를 구할 수 있다. 미소 translation \(\delta \mathbf{t}\)는 아래의 수식을 전개하면 되고:
(위에서도 앞선 글에서와 마찬가지로 미소 값들이 두 번 곱해지는 term들은 무시되었다) 미소 rotation \(\delta \theta\)에 대한 표현식은:
\[\theta_2+\delta \theta_2-\theta_1-\delta \theta_1 = \theta_2-\theta_1+\delta \theta\]을 풀면 된다. 따라서 이 두 식을 푼 후, 최종적으로 \(\boldsymbol{\delta} = \mathbf{H}_1 \boldsymbol{\delta}_1 + \mathbf{H}_2 \boldsymbol{\delta}_2\)로 두고 수식을 정리하면 아래와 같이 최종적으로 유도할 수 있다:
\[\boldsymbol{\delta}=\left[\begin{array}{l} \delta \mathbf{t} \\ \delta \theta \end{array}\right]=-\left[\begin{array}{cc} \mathbf{R}_2^\intercal \mathbf{R}_1 & -\hat{\Omega} \mathbf{R}_2^\intercal\left(\mathbf{t}_1-\mathbf{t}_2\right) \\ \mathbf{0} & 1 \end{array}\right]\left[\begin{array}{l} \delta \mathbf{t}_1 \\ \delta \theta_1 \end{array}\right]+\left[\begin{array}{cc} \mathbf{I}_{2 \times 2} & 0 \\ \mathbf{0} & 1 \end{array}\right]\left[\begin{array}{l} \delta \mathbf{t}_2 \\ \delta \theta_2 \end{array}\right]\; \; \; \; \text{(7)}\]Advanced: Adjoint Map and Beauty of Mathematics
사실 위와 같이 H1과 H2를 구하면 끝나는데, H1이 무엇을 의미하는지 살펴보고 이 글을 마치고자 한다.
먼저 왜?를 묻지 말고 받아들여야 할 것이 있는데, Pose2.cpp나 Pose3.cpp에는 아래와 같이 AdjointMap이라는 함수가 구현되어 있다 (adjoint map 자체에 대해서는 다음 글에서 살펴보자):
// See https://github.com/borglab/gtsam/blob/3af5360ad397422023160604de99d0de447b0a88/gtsam/geometry/Pose2.cpp#L127
// Calculate Adjoint map
// Ad_pose is 3*3 matrix that when applied to twist xi, returns Ad_pose(xi)
Matrix3 Pose2::AdjointMap() const {
double c = r_.c(), s = r_.s(), x = t_.x(), y = t_.y();
Matrix3 rvalue;
rvalue <<
c, -s, y,
s, c, -x,
0.0, 0.0, 1.0;
return rvalue;
}
그리고 다시 수식 (7)을 살펴보자. 수식 (7)을 다시 보니, H1 matrix는 \(h(\boldsymbol{\xi}_2, \boldsymbol{\xi}_1)\)의(i.e., \(\left[\begin{array}{cc}
\mathbf{R}^{\intercal}_2\mathbf{R}_1 & \mathbf{R}^{\intercal}_2(\mathbf{t}_1 - \mathbf{t}_2) \\
\mathbf{0} & 1
\end{array}\right]\)와 대응됨. 이 경우 위의 코드 snippet 상의 t_가 \(\mathbf{R}^{\intercal}_2(\mathbf{t}_1 - \mathbf{t}_2)\)이 되고, 코드 상에서 \((x, y)\)를 \((y, -x)\)로 변경하는 것이 \(-\hat{\Omega}\)를 곱해주는 것을 의미함) AdjointMap() 함수라는 것을 알 수 있다.
그래서 실제로 gtsam/base/Lie.h 코드 내에 between을 계산하는 코드를 살펴보면(아래에서 derived()가 p1, g가 p2로 각각 대응된다고 생각하면 된다), H1의 값에 \(\left(\mathbf{T}^{w}_1\right)^{-1} \mathbf{T}^{w}_2\)의 inverse를 한 후(원래는 \(h(\boldsymbol{\xi}_1, \boldsymbol{\xi}_2)\)와 대응되던 transformation matrix가 inverse() 함수를 통해 해당 transformation matrix이 \(h(\boldsymbol{\xi}_2, \boldsymbol{\xi}_1)\)와 대응됨), AdjointMap() 함수를 통해 H1를 손쉽게 구하는 것을 볼 수 있다. 그리고 이는 3D에서도 마찬가지로 적용이 가능하기 때문에, 차원에 관계 없이 H1 matrix와 H2 matrix를 손쉽게 구하는 것이 가능해지게 된다:
// See https://github.com/borglab/gtsam/blob/3af5360ad397422023160604de99d0de447b0a88/gtsam/base/Lie.h#L63C3-L69C4
Class between(const Class& g, ChartJacobian H1,
ChartJacobian H2 = {}) const {
Class result = derived().inverse() * g;
if (H1) *H1 = - result.inverse().AdjointMap();
if (H2) *H2 = Eigen::Matrix<double, N, N>::Identity();
return result;
}
깔끔하고 아름답다!
Conclusion
대망의 Pose2의 BetweenFactor의 H1과 H2를 구하는 방법에 알아 보았다. 다시금 강조하지만, 단순히 BetweenFactor를 사용하고자 하는 입장에서는 전혀 알 필요가 없는 부분이다. 다만, SLAM의 optimization을 굉장히 low-level로 다뤄야 할 일이 있을 때 이런 과정을 모르면 GTSAM이 어떻게 동작하는지 절대 이해할 수 없기 때문에, 저 H matrix를 어떻게 유도하는 지 정리해보았다.
최대한 수학적 엄밀성을 따지기 보다는 이해가 쉽게 풀어 써보았는데, 모쪼록 읽는 분께 도움이 되었으면 한다. 만약 이해가 잘 안되는 부분이 있다면 앞선 글에서 설명했던 skew-symmetric matrix 부분과 unary factor를 다시 한 번 차근차근 읽어본 후 재도전(?)하는 것을 추천한다.
GTSAM Tutorial 시리즈입니다.
- GTSAM Tutorial 1. SLAM을 위한 Between Factor 쉽게 이해하기
- GTSAM Tutorial 2. SE(2) Transformation matrix, Jacobian, 그리고 Block Operation
- GTSAM Tutorial 3. Skew Symmetric matrix 2차원에서 쉽게 이해하기
- GTSAM Tutorial 4. Unary Factor를 통한 Lie Group 클래스의 Jacobian 유도하기
- GTSAM Tutorial 5. Rot2의 unrotate 함수를 예제로 Jacobian 구해보기
- GTSAM Tutorial 6. Pose2의 BetweenFactor Jacobian 유도
- GTSAM Tutorial 7. Adjoint Map 쉽게 이해하기
- GTSAM Tutorial 8. Pose3의 BetweenFactor Jacobian 유도
- GTSAM Tutorial 9. Kimera-PGMO의 Deformation Factor Derivation
- GTSAM Tutorial 10. numericalDerivative를 통한 Factor Debugging