Setting of Ouster OS1-64
현 Ouster사에서 제공하는 driver를 통해 데이터를 받아보자
예시 Ouster Rosbag 파일은 여기를 통해 다운 가능하다(2020-01-20 기준)
How to install(세팅 하는 법)
- 먼저, Ouster 사에서 제공하는 driver를 catkin_ws/src 내에서 git clone한다. (2020-01-09 기준)
$ cd /home/$usr_name/catkin_ws/src$ git clone https://github.com/ouster-lidar/ouster_example
- 그 후 catkin_ws로 이동하여 complie해준다.
$ cd /home/$usr_name/catkin_ws$ catkin_make ouster_ros
혹은, catkin-tools를 이용하면 아래와 같이 컴파일 하면 된다.
$ catkin build ouster_ros드라이버를 통한 packet 파싱하기
- 여기를 통해 다운받은 bag 파일을 rosbag play를 통해서 실행을 시킨다.
rosbag play ouster_example.bag --clock- 그 후, driver상에서 제공해주는 launch file을 통해 data packet을 Ros 메세지로 변환할 수 있다.
roslaunch /home/($user_name)/catkin_ws/src/ouster_example-master/ouster_ros/os1.launch replay:=true그런데…막상 launch file을 실행하면 아래와 같이 md5sum 에러가 발생한다!!!!
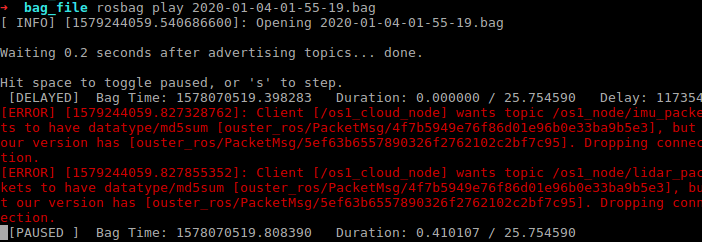
- md5sum 에러 기존의 compile된 파일과 msg가 맞지 않거나 할 때 뜨는 에러 (경험 상)
문제가 발생하는 이유?
Ouster 사에서 제공하는 driver 내의 패킷 메세지 내에 msg 상에 header가 포함되어 있지 않기 때문에 발생하는 것으로 보인다. 그로 인해서, packet data를 sensor_msgs로 변환할 때 ROS 상에서는 data 시간에 대한 정보가 없는 패킷을 받기 때문에 error가 발생시키는 것이다.
다시 말하자면, Ouster사에서 제공하는 드라이버/(혹은 데이터를 패킷으로 생성할 때) 내에서 TimeStamp를 찍어주지 않기 때문에 발생하는 에러로 보인다. 따라서 그 부분을 수정해줘야 한다.
해결책
- Ouster_ros 폴더 내의 msg/PacketMsg.msg내에
std_msgs/Header header추가해야 함.
(수정후)
std_msgs/Header headeruint8[] buf
- Ouster_ros 안의src/os1_node.cpp내에서 118번째 줄과 123번 줄에
lidar_packet.header.stamp.fromSec(ros::Time::now().toSec());imu_packet.header.stamp.fromSec(ros::Time::now().toSec());
를 추가해줘야 한다.
원 파일의 일부분은 아래와 같다.
int connection_loop(ros::NodeHandle& nh, OS1::client& cli) {
auto lidar_packet_pub = nh.advertise<PacketMsg>("lidar_packets", 1280);
auto imu_packet_pub = nh.advertise<PacketMsg>("imu_packets", 100);
PacketMsg lidar_packet, imu_packet;
lidar_packet.buf.resize(OS1::lidar_packet_bytes + 1);
imu_packet.buf.resize(OS1::imu_packet_bytes + 1);
while (ros::ok()) {
auto state = OS1::poll_client(cli);
if (state == OS1::EXIT) {
ROS_INFO("poll_client: caught signal, exiting");
return EXIT_SUCCESS;
}
if (state & OS1::ERROR) {
ROS_ERROR("poll_client: returned error");
return EXIT_FAILURE;
}
if (state & OS1::LIDAR_DATA) {
if (OS1::read_lidar_packet(cli, lidar_packet.buf.data()))
{
lidar_packet_pub.publish(lidar_packet);
}
}
if (state & OS1::IMU_DATA) {
if (OS1::read_imu_packet(cli, imu_packet.buf.data()))
{
imu_packet_pub.publish(imu_packet);
}
}
ros::spinOnce();
}
return EXIT_SUCCESS;
}
여기서 아래와 같이 119번째 줄과 125번 줄에 두 줄을 추가해주면 문제를 해결할 수 있다.
int connection_loop(ros::NodeHandle& nh, OS1::client& cli) {
auto lidar_packet_pub = nh.advertise<PacketMsg>("lidar_packets", 1280);
auto imu_packet_pub = nh.advertise<PacketMsg>("imu_packets", 100);
PacketMsg lidar_packet, imu_packet;
lidar_packet.buf.resize(OS1::lidar_packet_bytes + 1);
imu_packet.buf.resize(OS1::imu_packet_bytes + 1);
while (ros::ok()) {
auto state = OS1::poll_client(cli);
if (state == OS1::EXIT) {
ROS_INFO("poll_client: caught signal, exiting");
return EXIT_SUCCESS;
}
if (state & OS1::ERROR) {
ROS_ERROR("poll_client: returned error");
return EXIT_FAILURE;
}
if (state & OS1::LIDAR_DATA) {
if (OS1::read_lidar_packet(cli, lidar_packet.buf.data()))
{
lidar_packet.header.stamp.fromSec(ros::Time::now().toSec());
lidar_packet_pub.publish(lidar_packet);
}
}
if (state & OS1::IMU_DATA) {
if (OS1::read_imu_packet(cli, imu_packet.buf.data()))
{
imu_packet.header.stamp.fromSec(ros::Time::now().toSec());
imu_packet_pub.publish(imu_packet);
}
}
ros::spinOnce();
}
return EXIT_SUCCESS;
}
rosbag으로 데이터 확인할 때 명령어들
rosbag play A4.bag --clockrosparam set use_sim_time trueroslaunch /home/shapelim/catkin_ws/src/ouster_example-master/ouster_ros/os1.launch replay:=truereplay:=true bag 파일의 패킷을 풀 때 필요함!
결과
수정 결과, driver를 launch로 실행시켰을 때 아래와 같이 패킷이 /os1_cloud_node/points과 /os1_cloud_node/imu로 잘 파싱되는 것을 확인할 수 있다.
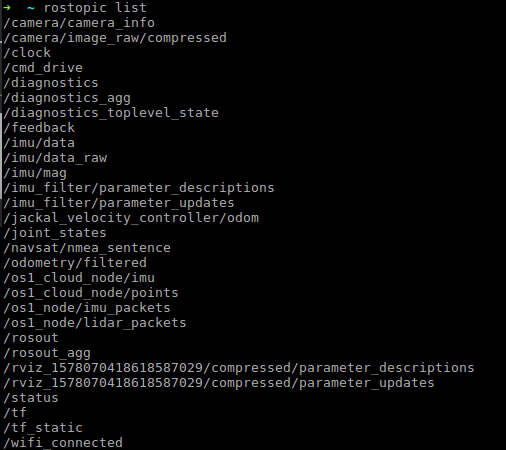
sensor_smgs/PointCloud2로 잘 파싱되어 있는 것을 확인할 수 있고, 바로 rviz를 통해서도 데이터를 육안으로 확인이 가능하다.
(새벽 한 시에 수정하고 데이터를 얻었어서…눈갱 죄송합니다)