PCL Ptr in Class
이번 시간에는 마지막으로, Class 내에서 멤버 변수로 사용할 때의 주의점에 대해서 말씀 드리고, Ptr에 대한 얘기를 끝내겠습니다.
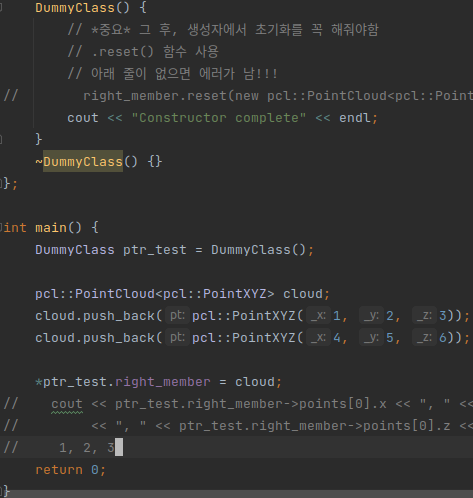
Error Case 1
위의 코드에서 보이는 것처럼, 멤버 변수에서 사용해야할 때는 선언을 따로 해주고, 생성자(costructor)에서 동적할당을 해서 써야 합니다.
위의 Error Case 1처럼, 내부에서 new를 통해 힙 영역에 동적할당을 해주게 되면 에러가 나는 것을 확인할 수 있습니다.
Error Case 2
만약 선언 후에 생성자 내에서 동적 할당을 해주지 않으면 어떻게 될까요?

다음과 같이 exit code 139가 뜨는데, 이 의미는 다음과 같습니다.
exit(139): It indicates Segmentation Fault which means that the program was trying to access a memory location not allocated to it. This mostly occurs while using pointers or trying to access an out-of-bounds array index.
즉, 조세호 님마냥 ‘할당 안 받았는데 어떻게 데이터를 넣어요?!’ 하는 error가 일어나는 것을 엿볼 수 있습니다.
여기까지 하면 Ptr의 개념을 어느정도 다 익히셨으리라 보고, 다음 lecture부터는 실제로 많이 사용하는 함수들을 위주로 살펴보겠습니다.
Point Cloud Library Tutorial 시리즈입니다.
모든 코드는 이 레포지토리에 있고, ros package로 구성되어 있어 build하여 직접 돌려보실 수 있습니다
- ROS Point Cloud Library (PCL) - 0. Tutorial 및 기본 사용법
- ROS Point Cloud Library (PCL) - 1. Ptr, ConstPtr의 완벽 이해 (1) shared_ptr
- ROS Point Cloud Library (PCL) - 1. Ptr, ConstPtr의 완벽 이해 (2) Ptr in PCL
- ROS Point Cloud Library (PCL) - 1. Ptr, ConstPtr의 완벽 이해 (3) Ptr in 클래스 멤버변수
- ROS Point Cloud Library (PCL) - 2. 형변환 - toROSMsg, fromROSMsg
- ROS Point Cloud Library (PCL) - 3. Transformation
- ROS Point Cloud Library (PCL) - 4. Viewer로 visualization하는 법
- ROS Point Cloud Library (PCL) - 5. Voxelization
- ROS Point Cloud Library (PCL) - 6. PassThrough
- ROS Point Cloud Library (PCL) - 7. Statistical Outlier Removal
- ROS Point Cloud Library (PCL) - 8. KdTree를 활용한 Radius Search
- ROS Point Cloud Library (PCL) - 9. KdTree를 활용한 K-nearest Neighbor Search (KNN)
- ROS Point Cloud Library (PCL) - 10. Normal Estimation
- ROS Point Cloud Library (PCL) - 11. Iterative Closest Point (ICP)
- ROS Point Cloud Library (PCL) - 12. Generalized Iterative Closest Point (G-ICP)
- ROS Point Cloud Library (PCL) - 13. getVector3fMap()을 통한 효율적인 복사