FeatureAssociation in LeGO-LOAM (2) Edge and Planar Feature Extraction
(Cont’d)
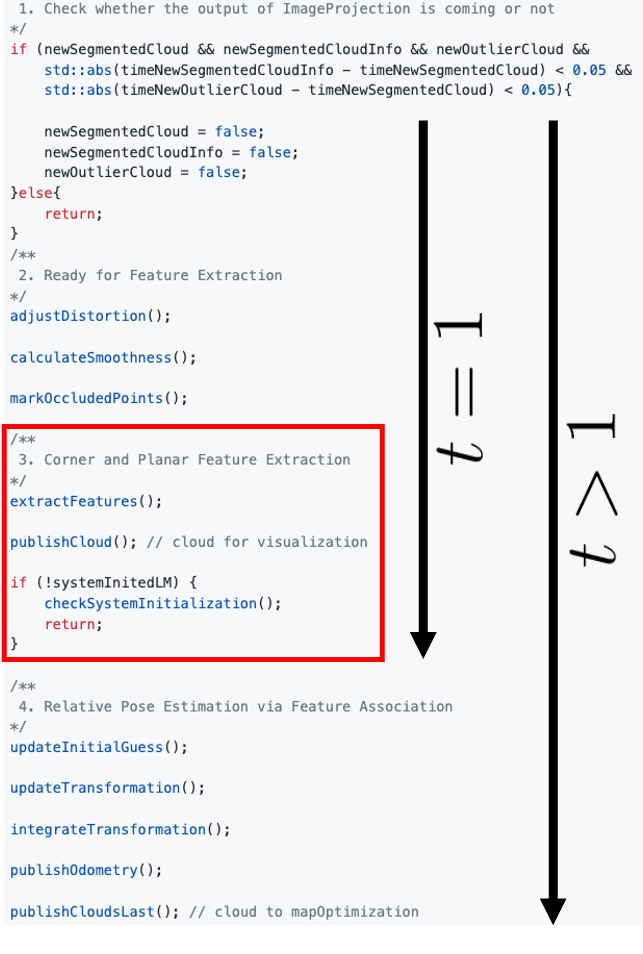
Feature를 뽑을 준비가 끝나면 extractFeatures() 함수를 통해 feature를 추출한다. 그런데, relative pose를 추정하기 위해서는 연속적인 두 프레임의 feature가 필요하기 때문에, i.e. features on t-1 & features on t, initialization이 필요하다. 따라서 t=1인 경우에는 위와 같이 checkSystemInitialization() 함수까지만 진행이 되고 return 을 통해 종료된다.
extractFeatures()
이 함수에서는 앞에 계산했던 cloudCurvature[i] = diffRange*diffRange (from calculateSmoothness())와 cloudNeighborPicked[i]를 활용하여 최종적으로 feature extraction을 진행한다. 크게 feature extraction 과정은 edge feature과 corner feature를 나눠서 뽑는다.
void extractFeatures()
{
cornerPointsSharp->clear();
cornerPointsLessSharp->clear();
surfPointsFlat->clear();
surfPointsLessFlat->clear();
for (int i = 0; i < N_SCAN; i++) {
surfPointsLessFlatScan->clear();
for (int j = 0; j < 6; j++) {
int sp = (segInfo.startRingIndex[i] * (6 - j) + segInfo.endRingIndex[i] * j) / 6;
int ep = (segInfo.startRingIndex[i] * (5 - j) + segInfo.endRingIndex[i] * (j + 1)) / 6 - 1;
if (sp >= ep)
continue;
std::sort(cloudSmoothness.begin()+sp, cloudSmoothness.begin()+ep, by_value());
// ---------------------------
// 1. Extract corner features
// ---------------------------
int largestPickedNum = 0;
for (int k = ep; k >= sp; k--) {
int ind = cloudSmoothness[k].ind;
if (cloudNeighborPicked[ind] == 0 &&
cloudCurvature[ind] > edgeThreshold &&
segInfo.segmentedCloudGroundFlag[ind] == false) {
largestPickedNum++;
if (largestPickedNum <= 2) {
cloudLabel[ind] = 2;
cornerPointsSharp->push_back(segmentedCloud->points[ind]);
cornerPointsLessSharp->push_back(segmentedCloud->points[ind]);
} else if (largestPickedNum <= 20) {
cloudLabel[ind] = 1;
cornerPointsLessSharp->push_back(segmentedCloud->points[ind]);
} else {
break;
}
cloudNeighborPicked[ind] = 1;
for (int l = 1; l <= 5; l++) {
int columnDiff = std::abs(int(segInfo.segmentedCloudColInd[ind + l]
- segInfo.segmentedCloudColInd[ind + l - 1]));
if (columnDiff > 10)
break;
cloudNeighborPicked[ind + l] = 1;
}
for (int l = -1; l >= -5; l--) {
int columnDiff = std::abs(int(segInfo.segmentedCloudColInd[ind + l]
- segInfo.segmentedCloudColInd[ind + l + 1]));
if (columnDiff > 10)
break;
cloudNeighborPicked[ind + l] = 1;
}
}
}
// ---------------------------
// 2. Extract planar features
// ---------------------------
int smallestPickedNum = 0;
for (int k = sp; k <= ep; k++) {
int ind = cloudSmoothness[k].ind;
if (cloudNeighborPicked[ind] == 0 &&
cloudCurvature[ind] < surfThreshold &&
segInfo.segmentedCloudGroundFlag[ind] == true) {
cloudLabel[ind] = -1;
surfPointsFlat->push_back(segmentedCloud->points[ind]);
smallestPickedNum++;
if (smallestPickedNum >= 4) {
break;
}
cloudNeighborPicked[ind] = 1;
for (int l = 1; l <= 5; l++) {
int columnDiff = std::abs(int(segInfo.segmentedCloudColInd[ind + l]
- segInfo.segmentedCloudColInd[ind + l - 1]));
if (columnDiff > 10)
break;
cloudNeighborPicked[ind + l] = 1;
}
for (int l = -1; l >= -5; l--) {
int columnDiff = std::abs(int(segInfo.segmentedCloudColInd[ind + l]
- segInfo.segmentedCloudColInd[ind + l + 1]));
if (columnDiff > 10)
break;
cloudNeighborPicked[ind + l] = 1;
}
}
}
3. Set surfPointsLessFlatScan
for (int k = sp; k <= ep; k++) {
if (cloudLabel[k] <= 0) {
surfPointsLessFlatScan->push_back(segmentedCloud->points[k]);
}
}
}
surfPointsLessFlatScanDS->clear();
downSizeFilter.setInputCloud(surfPointsLessFlatScan);
downSizeFilter.filter(*surfPointsLessFlatScanDS);
*surfPointsLessFlat += *surfPointsLessFlatScanDS;
}
}
a) 가장 먼저, 각 channal 별로 start point (sp)와 end point (ep)를 아래와 같이 6분할한다. 코드를 자세히 보기 전에는 단순히 이미지 plane을 6개의 subregion으로 쪼개서 feature를 고루 뽑는 줄 알았는데, 그게 아니라 아래와 같이 valid points 중 앞에서 5번째와 뒤에서 6번째 사이를 6분할한다 (기억이 안나면 여기의 (b) 참조).
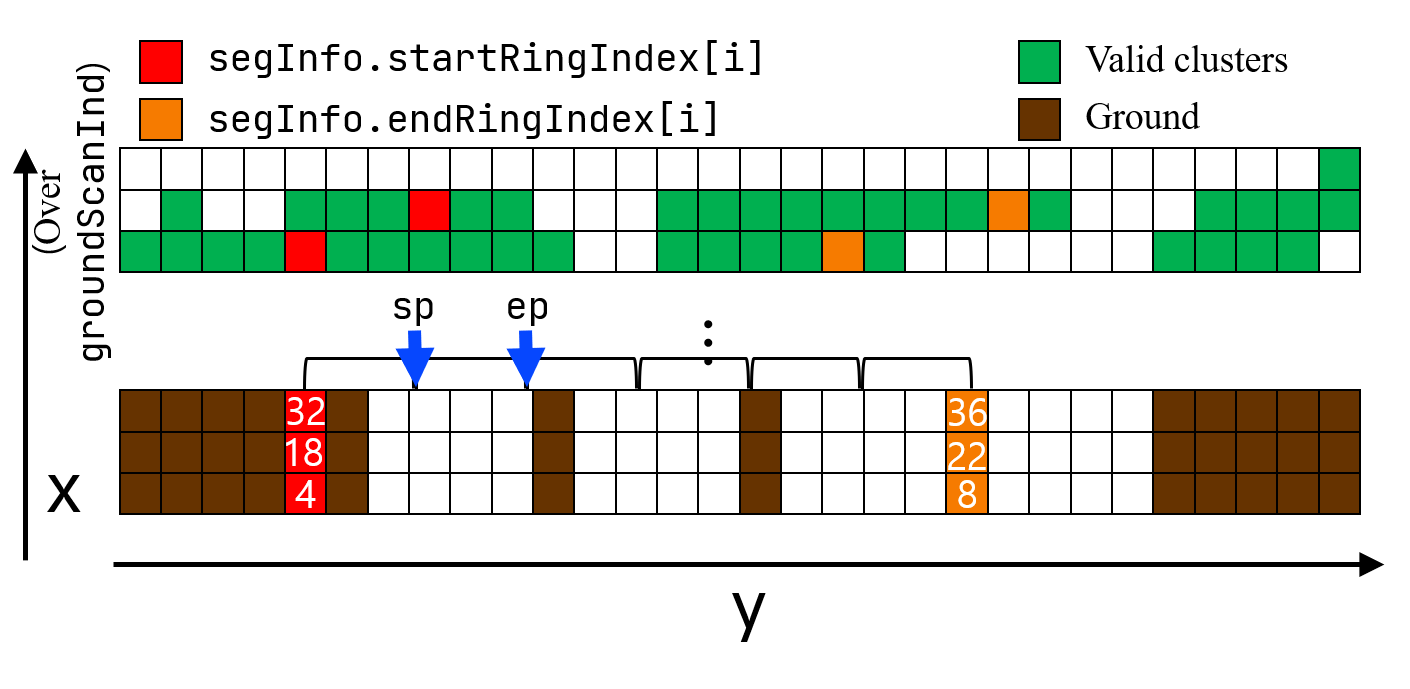 (그림은 간소하게 그렸으나, y 방향으로 주로 1,000 이상의 pixel이 있음을 양지 부탁드립니다…)
(그림은 간소하게 그렸으나, y 방향으로 주로 1,000 이상의 pixel이 있음을 양지 부탁드립니다…)
b) 그 후 해당 subregion을 sorting을 한다. 그래서 sp쪽에서는 curvature가 작은 값이 위치하게 되고, ep 쪽에는 반대로 curvature가 크게 위치하게 된다.
c) Sorting 후에 edge features를 선별하는데,
* markOccludedPoints() 함수로부터 마스킹이 안 되었고 (cloudNeighborPicked[ind] == 0)
* curvature 값이 충분히 크고 (cloudCurvature[ind] > edgeThreshold, 클수록 양옆의 range 차이가 linear하지 않다는 뜻)
* 해당 pixel이 ground 가 아닌 경우에만 corner feature를 뽑는다 (segInfo.segmentedCloudGroundFlag[ind] == false. 바닥이 아닌 곳에서 edge를 뽑는 것이 목표이기 때문. 애시당초 LeGO-LOAM은 험지에서 잘하기 위한 LOAM이어서 주로 이 corner는 벽의 모서리와 나무 줄기/가로등을 지칭한다고 생각하면 될듯).
d) 위의 조건을 만족하면 해당 pixel을 corner feature로 pixel을 뽑는다. 그 후, cloudNeighborPicked[ind] = 1로 설정하여 해당 pixel이 중복으로 뽑히는 걸 방지하고, feature를 고루 뽑기 위해 그 주변의 +-10 index 범위의 pixel은 feature를 뽑는데 사용하지 않는다.
e) 제일 sharp한 2개의 points를 뽑은 후, cornerPointsLessSharp를 할당한다.
f) 위의 과정과 비슷하게 planar feature를 뽑는 것을 반복하는데, planar feature는 우선적으로 ground에서만 surfPointsFlat으로 할당한다.
g) 여기서 특이한건, surfPointsLessFlat를 할당하는 방법인데, surfPointsLessFlat는 planar feature + 할당되지 않은 모든 feature로 구성되어 있다. feature 뽑는 것을 진행하면 각 cloudLabel[i]이 다음과 같이 할당되어 있는데:
cloudLabel[i] == 2: Sharp corner featurescloudLabel[i] == 1: Less harp corner featurescloudLabel[i] == 0: Not assignedcloudLabel[i] == -1: Planar features
cloudLabel[i]가 0이거나 -1인 경우에 대해서만 아래와 같이 surfPointsLessFlatScan에 다 때려 넣는다.
// 3. Set surfPointsLessFlatScan
for (int k = sp; k <= ep; k++) {
if (cloudLabel[k] <= 0) {
surfPointsLessFlatScan->push_back(segmentedCloud->points[k]);
}
}
마지막으로 각 channel 별로 voxelization을 시행한다. Voxelsize는 initializationValue() 함수에서 다음과 같이 미리 크기가 지정 되어있다.
downSizeFilter.setLeafSize(0.2, 0.2, 0.2);
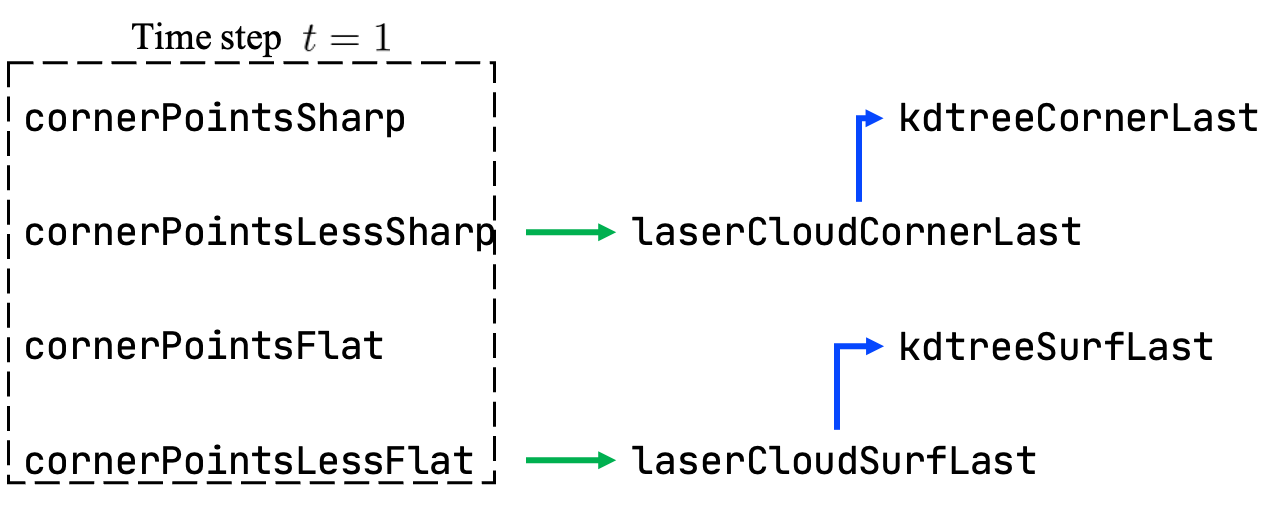
NOTE: cornerPointsLessSharp와 surfPointsLessFlat는 해당 frame이 t-1에서의 역할을 할 때 활용된다. 이 두 feature 집합을 편히 less-feature라 부를 때, 이 less-feature들은 t-1의 feature 입력값으로, distint feature (i.e. cornerPointsSharp & surfPointsFlat)들은 t의 입력값이 되어 서로 간에 correspondence를 찾는다.
checkSystemInitialization()
Feature를 추출한 후에는 FeatureAssociation이 처음 feature를 뽑았는지 아닌지를 확인한다. 초기에는 systemInitedLM = false로 되어 있는데, 이는 LiDAR odometry를 계산하려면 t-1과 t의 두 프레임의 feature set이 필요하기 때문에 체크하는 것이다. 코드는 아래와 같다.
void checkSystemInitialization(){
pcl::PointCloud<PointType>::Ptr laserCloudTemp = cornerPointsLessSharp;
cornerPointsLessSharp = laserCloudCornerLast;
laserCloudCornerLast = laserCloudTemp;
laserCloudTemp = surfPointsLessFlat;
surfPointsLessFlat = laserCloudSurfLast;
laserCloudSurfLast = laserCloudTemp;
kdtreeCornerLast->setInputCloud(laserCloudCornerLast);
kdtreeSurfLast->setInputCloud(laserCloudSurfLast);
laserCloudCornerLastNum = laserCloudCornerLast->points.size();
laserCloudSurfLastNum = laserCloudSurfLast->points.size();
// Just for visualization
sensor_msgs::PointCloud2 laserCloudCornerLast2;
pcl::toROSMsg(*laserCloudCornerLast, laserCloudCornerLast2);
laserCloudCornerLast2.header.stamp = cloudHeader.stamp;
laserCloudCornerLast2.header.frame_id = "/camera";
pubLaserCloudCornerLast.publish(laserCloudCornerLast2);
sensor_msgs::PointCloud2 laserCloudSurfLast2;
pcl::toROSMsg(*laserCloudSurfLast, laserCloudSurfLast2);
laserCloudSurfLast2.header.stamp = cloudHeader.stamp;
laserCloudSurfLast2.header.frame_id = "/camera";
pubLaserCloudSurfLast.publish(laserCloudSurfLast2);
transformSum[0] += imuPitchStart;
transformSum[2] += imuRollStart;
systemInitedLM = true;
}
즉, t=1일 때는 다음과 같이 Kd Tree만 세팅한 후 systemInitedLM를 true로 세팅하여 종료한다. 여기서 t=1일 때 laserCloudCornerLast와 laserCloudSurfLast는 크기가 0인 point cloud이다 (swap을 하지만 사실상 별로 의미 없는 swap임).
이렇게 feature setting이 완료되면, 마지막으로 relative pose를 추정한다.
LeGO-LOAM의 line-by-line 설명 시리즈입니다.
- LeGO-LOAM-Line-by-Line-1.-Introduction: Preview and Preliminaries
- LeGO-LOAM-Line-by-Line-2.-ImageProjection-(1): Range Image Projection & Ground Removal
- LeGO-LOAM-Line-by-Line-2.-ImageProjection-(2): Cloud Segmentation using Clustering
- LeGO-LOAM-Line-by-Line-3.-FeatureAssociation-(1): Ready for Feature Extraction
- LeGO-LOAM-Line-by-Line-3.-FeatureAssociation-(2): Corner and Planar Feature Extraction
- LeGO-LOAM-Line-by-Line-3.-FeatureAssociation-(3): Relative Pose Estimation via Two-stage Optimization